
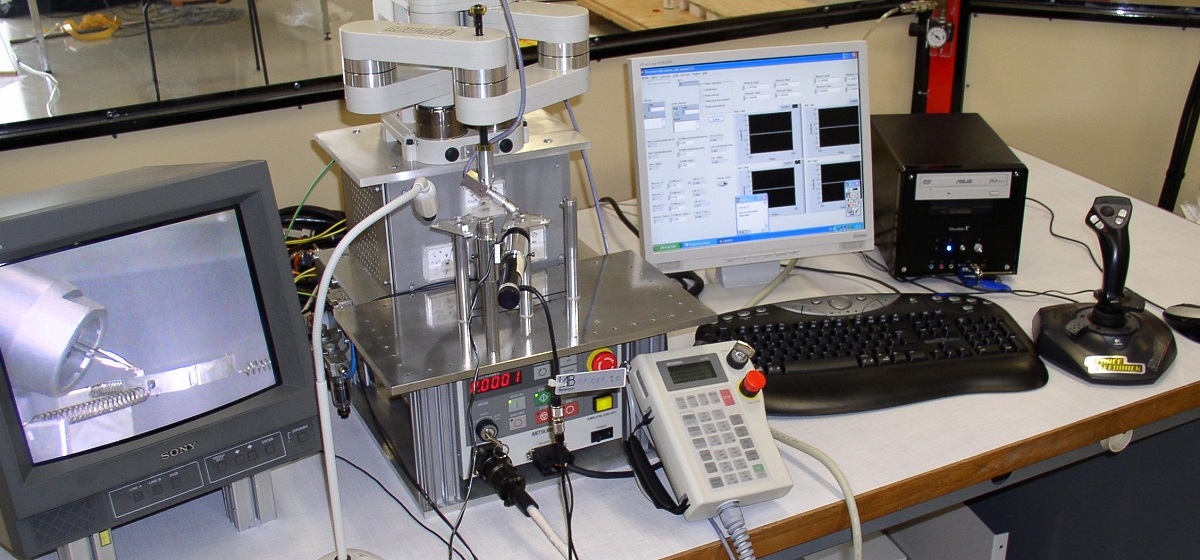
Cette station de micromanipulation, présentée au salon MICRONORA, est matériellement constituée des éléments suivants :
- Un robot industriel RP-1AH associé à une unité de commande CR1 et un bôitier d’apprentissage R28 TB ;
- Une micropince de type LEMMOC développée en interne au laboratoire et de son interface haute tension ;
- Un ordinateur PC de type Barebone, équipé d’une carte d’acquisition (PCI-6733 de National Instruments) permettant de piloter la micropince et d’une liaison série RS-232C pour communiquer avec l’unité de commande du robot ;
- Plusieurs tables compliantes offrant des environnements de travail sécurisés afin d’empêcher toute collision de la micropince avec son environnement ;
- Un système de vision composé de deux caméras (vue de dessus et vue de profil) et d’un moniteur permettant à l’opérateur de suivre en temps réel l’évolution des tâches de micromanipulation ;
Architecture logicielle
L’architecture logicielle s’articule autour de deux applications de type maître esclave. Le programme esclave, chargé dans l’unité de commande du robot, et écrit en Melfa Basic IV, est en attente des ordres transmis par l’application maître. Cette dernière, développée sur PC sous Labview® 7.1 (National Instruments), transmet les informations nécessaires à l’unité de commande du robot et à la micropince en vue d’offrir à l’opérateur les fonctionnalités suivantes :
1. L’étalonnage de la station
éalisée une fois, elle permet de fiabiliser la programmation des trajectoires tout en prévenant toute collision entre la micropince et son environnement. Pour effectuer cela, deux étapes sont requises :
- Déterminer les coordonnées de la transformée outil de la micropince associée à son support, afin d’effectuer des déplacements par rapport au repère outil et non plus par rapport au repère base du robot ;
- Déterminer les coordonnées des repères (vrac, palette et travail) dans le repère base du robot. Ceci permet au programme esclave d’interdire tout mouvement dont les consignes conduisent à une position outil inférieure au plan du repère considéré.
Toutes ces valeurs de paramètres sont transmises par le PC à l’unité de commande du robot, que le programme esclave prend en compte de manière dynamique, c'est-à-dire en cours d’exécution.
2. La micromanipulation téléopérée d’échantillons submillimétriques
Ce mode de fonctionnement permet à l’opérateur, via certaines touches du clavier, de piloter les déplacements incrémentaux de l’outil du robot, en translation selon ses axes x, y, z et en rotation autour de l’axe J4, ainsi que de la micropince, en ouverture- fermeture et en montée-descente des doigts. L’incrément de chacun de ces 4 types de déplacement est configurable par le biais de l’interface graphique grâce à l’utilisation du clavier et/ou de la souris. Les trajectoires du robot et des doigts de la pince s’effectuent selon des interpolations linéaires en position pour le robot et en tension pour la pince.
 |  |