
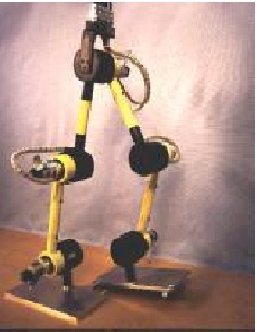
Le Robot Bipède
Travaux réalisées au sein du Goupe LSIIT - AVR à l'ENSPS
L'objectif de cette thèse était, d'une part, l'étude de méthodologies de développement de structures de robots simples, modulaires et à faible coût où axes mécaniques, actionneurs, capteurs et commande sont conçus de façon interdépendante, et d'autre part, nous nous sommes intéressés à l'étude de systèmes d'actionneurs et de trajectoires de robots minimisant la consommation d'énergie.
Cette recherche a abouti entre autres à la définition d'une nouvelle structure de robot bipède possédant notamment des actionneurs permettant d'emmagasiner de l'énergie sous forme mécanique et de minimiser ainsi l'énergie électrique fournie. L'autre point important est la détermination de trajectoires minimales en énergie (en l'occurrence des pas pour notre robot bipède). Cette recherche est fondée sur la décomposition des trajectoires articulaires du robot en séries de Fourier et une optimisation paramétrique sous contrainte des coefficients des séries par plusieurs algorithmes d'optimisation. La comparaison de trois algorithmes parmi les plus robustes, algorithmes génétiques codés réels, ''Simulated Annealing'' et Simplex de Nelder & Mead, montre la supériorité des algorithmes génétiques en particulier dans le cas de la prise en compte de contraintes et l'optimisation simultanée de paramètres structurels.
Les matrices de nanoaiguilles
Réalisées au sein du LIMMS - Fujita-lab
Las de faire de la microrobotique centimétrique, j'ai demandé un détachement au CNRS afin de partir au LIMMS (Japon) pour me former aux microtechnologies. J'ai ainsi développé un projet de matrices de microaiguilles pour l'insertion de gènes dans des cellules cancéreuses de type Jurkat. La suite précise les tenant et aboutissants de ce projet. Les microsystèmes liés à la biologie sont actuellement un champ de recherches en expansion exponentielle. En fait, la biologie traitant naturellement de petites entités (cellules, protéines, ...) les microsystèmes sont, de par leur dimensions, parfaitement adaptés au traitement électromécanique de ces entités. L'interaction biologie et MEMS ouvrent des champs nouveaux d'investigation. L'un de ces thèmes est la transformation génétique des cellules. Ce thème est prépondérant pour le développement des thérapies géniques.
La classification des méthodes d'insertion par Luo and Saltman (Nature 2000) montre que l'utilisation de micropipettes est la méthode qui présente la plus faible toxicité (méthodes biologiques incluses) et donne un bon taux de survie après transfection. Néanmoins, il faut minimiser ces résultats en prenant en compte deux points importants. Le premier est que l'utilisation de micropipettes est limitée à des cellules dont le diamètre est environ vingt fois plus grand que celui de la micropipette. Le second point est le nombre de cellules transfectées. En effet cette méthode est essentiellement une méthode manuelle, une seule cellule est transfectée à la fois. La principale idée de ce projet est de préserver les qualités intrinsèques (toxicité, taux de survie) de cette méthode en améliorant ses points faibles (nombre de cellules transfectées) par une parallélisation massive.
L'étude bibliographique de l'insertion mécanique de gènes montre plusieurs problèmes tels que la dénaturation des protéines et leur coagulation sur le verre des micropipettes ou les dommages causés à l'enveloppe extérieure de la cellule. Aucune solution n'est donnée mais quelques directions de recherche peuvent être déduites de la littérature. Le premier point évident est la réduction de la taille des micropipettes. Actuellement, les micropipettes utilisées ont un diamètre extérieur de 0,7 ~ 1 µm et donnent un taux de survie de l'ordre de 25%. Avec une réduction à 0,5 µm une amélioration du taux de survie allant jusqu'à 50% peut être espérée.
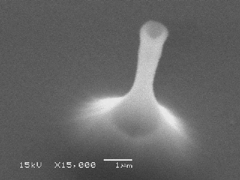
Les cellules Jurkat ayant un diamètre de 10 microns, un diamètre final de l'ordre de 500nm devrait donner un bon taux de survie. Par ailleurs, afin de minimiser le volume endommagé dans le cytoplasme, les micropipettes doivent présenter un grand rapport de forme. Une brève étude sur les matériaux utilisés montre que le verre est systématiquement utilisé, sans doute car il est aisé de réaliser des aiguilles très fines (1 µm). Dans notre cas, nous les réaliserons en oxyde de silicium (SiO2), chimiquement proche du verre.
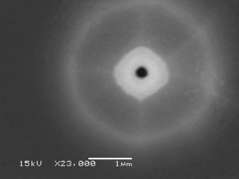
Le cahier des charges précédent conduit à un procédé de fabrication original. Une première étape de gravure profonde (en anglais : ICP-RIE) sur la face arrière réalise le diamètre intérieur de la micropipette. La forme extérieure est réalisée sur la face avant par gravure sèche isotrope. Cette forme est alors oxydée pour créer la micropipette. Afin de créer la forme creuse, il est nécessaire d'empêcher l'oxydation du silicium au bout de la pointe. Un film de nitrure de silicium (Si3N4) réalise cela. Ce film est alors gravé laissant apparaître le silicium non oxydé. Enfin, le silicium bouchant la micropipette est enlevé par gravure sèche avec du XeF2.
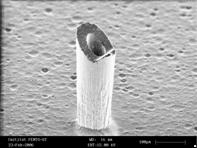
Le point clé a été l'obtention d'une gravure "presque verticale" du silicium afin d'obtenir un bon rapport d'aspect hauteur/diamètre pour l'aiguille. Quelques essais infructueux fondés sur les gaz SF6 : O2 : CHF3 ont conduit à l'utilisation d'argon. En effet, l'argon réalise une gravure purement mécanique et par conséquent détruit progressivement le masque composé de Si3N4 et de résine. Ainsi, le diamètre du masque diminue au cours de la gravure et améliore le rapport de forme. Dans notre cas les meilleurs résultats ont été obtenus avec : SF6 : 25 sccm Ar : 25 sccm, 5 Pa, 50 W.
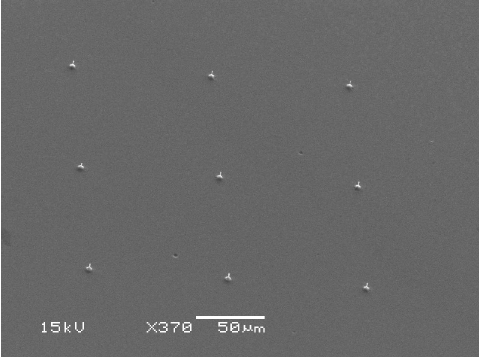
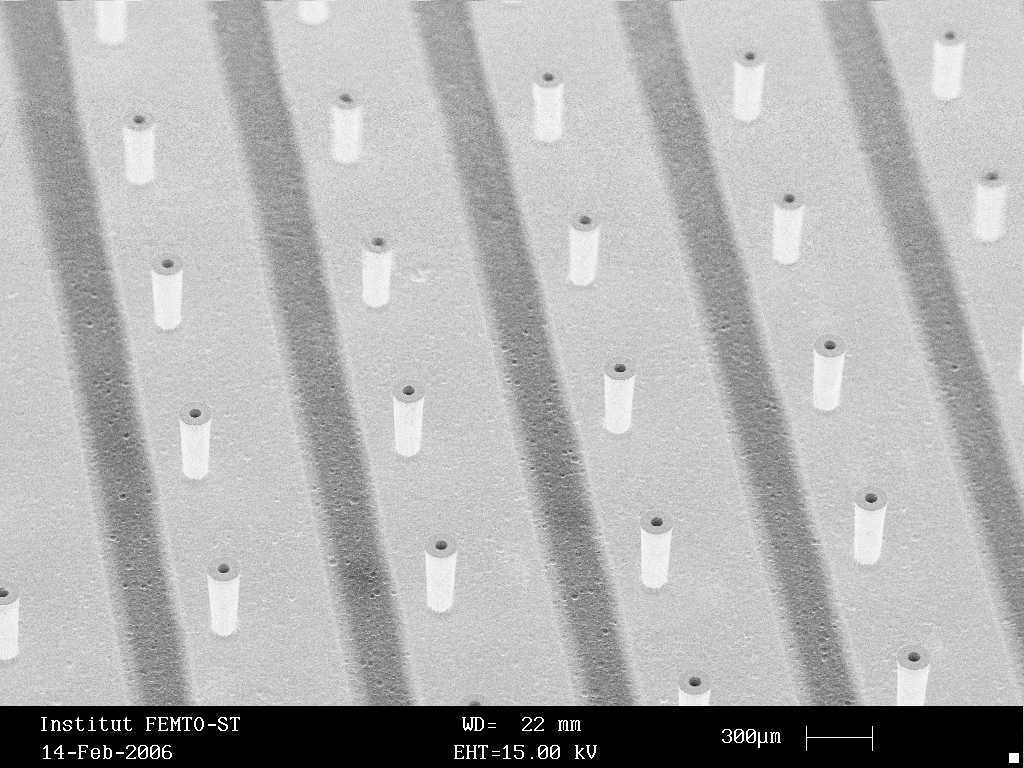
Les résultats de ces recherches sont illustrés sur les figures suivantes. Ces micropipettes sont, à ma connaissance, les plus petites jamais réalisées. Néanmoins, il reste une étape importante à mettre au point : l'injection. En effet, les premiers essais d'injection montrent que le liquide coule à travers une partie seulement de la surface. Un projet complémentaire est actuellement à l'étude.
 |  |
 |
Matrices de microaiguilles
Le projet européen ANGIOSKIN
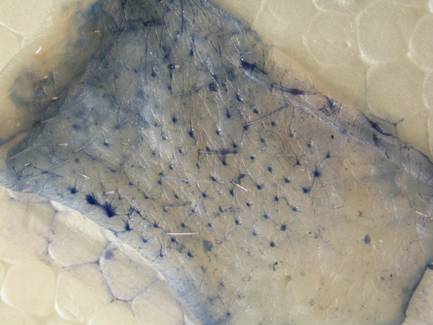
Ce projet européen, un STREP plus exactement, concernait le traitement des maladies de peau par transformation génétique locale. Cela consiste plus exactement à transformer génétiquement la partie de la peau malade par une électroporation in vivo. Pour cela, des matrices d'aiguilles et d'électrodes capables de pénétrer la peau puis d'injecter un volume contrôlé et enfin d'appliquer localement un champ électrique intense, doivent être conçues et réalisées. En tant que "task leader", je réalise les matrices d'aiguilles et coordonne le travail avec le laboratoire BIOMIS/SATIE qui réalise les réseaux microfluidiques et le laboratoire de génie électrique de l'université de Lubjana qui étudie les champs électriques. Doté de 255 k€, ce projet de 4 ans s'est termine en 2010 par un succès total de cette partie. Ce travail a donné lieu à la rédaction d'un brevet sur la méthodologie à appliquer pour faire pénétrer des matrices de microaiguilles.
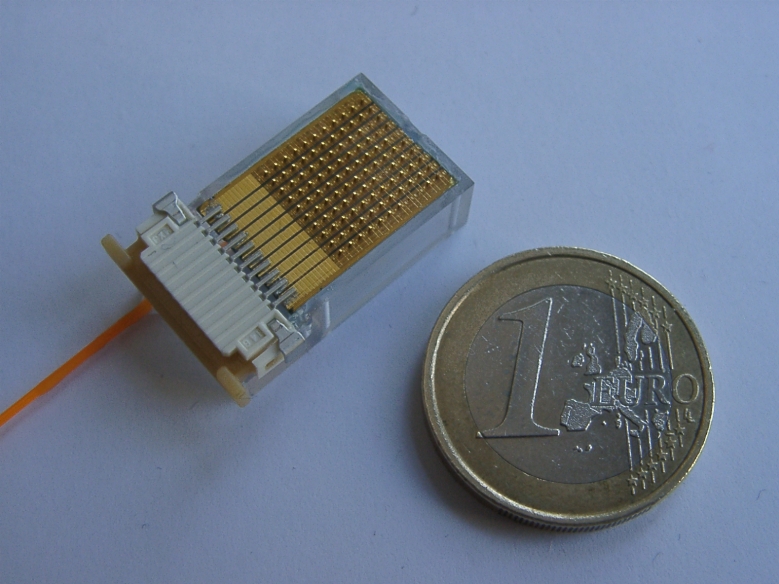 |  |
 |  |
- L'état de l'art sur les microaiguilles jusqu'en 2004 Workshop Micro Dosing Systems, Munich, October 2005.
PHRC aiguille plane
Parallèlement à ce projet je participe à un PHRC sur le prélèvement sanguin au talon du bébé qui a déjà donné lieu à deux publications en congrès. Notament
- La douleur chez le nouveau né : Poster présenté à la Société Française de Pédiatrie.